Kontrolcü
Dağıtılmış kontrol mimarisi.
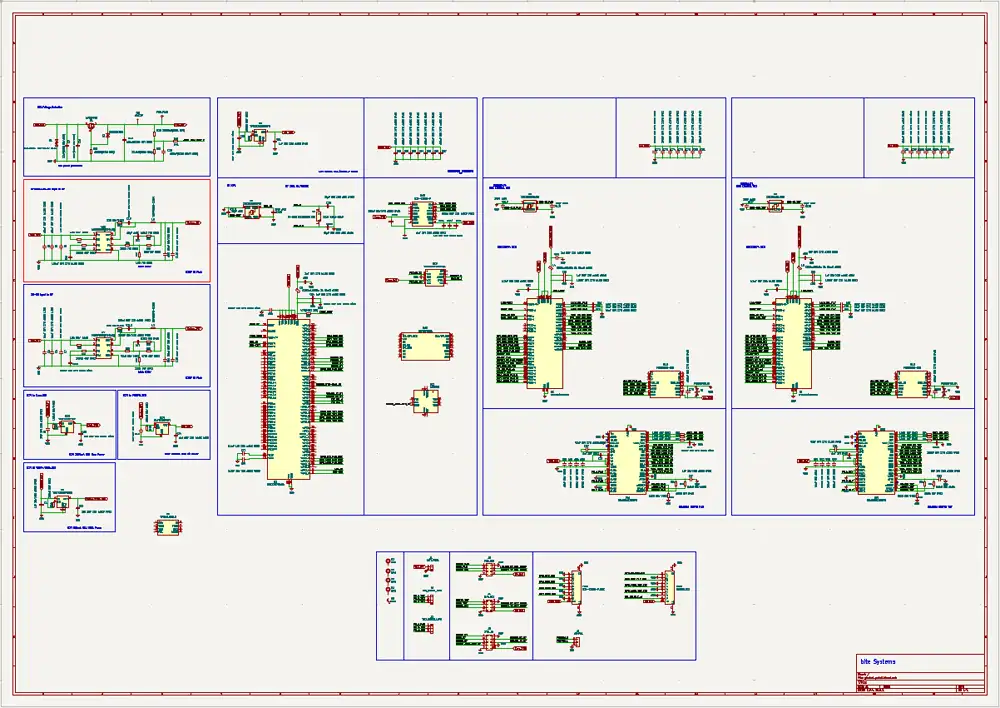
Merkezi MCU duruş tahmini ve stabilizasyonu üstlenir; her eksen için ayrı FOC modülleri motor kontrolünü yönetir. Modüller arası iletişim deterministik SPI üzerinden sağlanır; böylece her eksen donanım seviyesinde izole kalır.
10kHz
Stabilizasyon
40kHz
FOC akım döngüsü
21bit
Mutlak enkoder
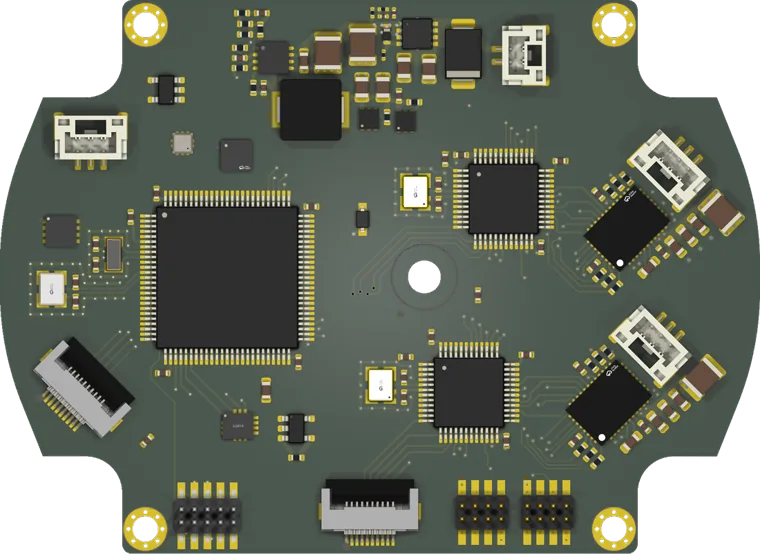
Kontrolcü PCB · v1.2
Vision
Onboard detection and tracking.
Detection and tracking happen entirely on the gimbal — no cloud, no ground-station GPU. The video pipeline is split in two: image processing at the sensor head, inference and tracker on the main board where heat can be managed. Both stages communicate over a dedicated video link.
1080p30
sustained
Detection
Multi-target
simultaneous
Tracking
On-device
no cloud, no GPU
Inference
Built on permissively licensed open IP — no encrypted vendor blobs, no single-supplier lock-in. Detection models are swappable: train and deploy your own without replacing the platform.
Vision subsystem · v1.0