Controller
Distributed control architecture.
A central brain MCU handles attitude estimation and stabilization; per-axis FOC nodes handle motor control. Communication runs over deterministic SPI, allowing each axis to remain hardware-isolated.
10kHz
Stabilization
40kHz
FOC current loop
21bit
Absolute encoder
The controller PCB integrates the brain MCU and both per-axis FOC nodes on a single round board, sized to mount inside the gimbal sphere.
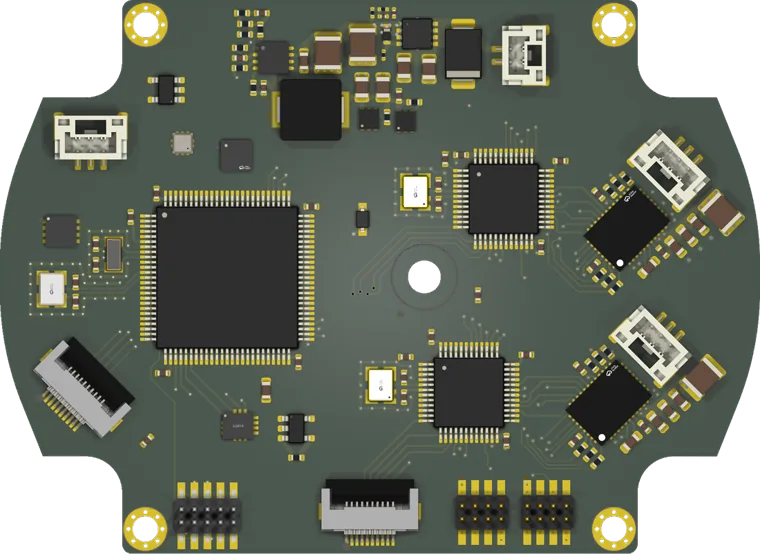
Controller PCB · v1.2
Vision
Onboard detection and tracking.
Detection and tracking happen entirely on the gimbal — no cloud, no ground-station GPU. The video pipeline is split in two: image processing at the sensor head, inference and tracker on the main board where heat can be managed. Both stages communicate over a dedicated video link.
1080p30
sustained
Detection
Multi-target
simultaneous
Tracking
On-device
no cloud, no GPU
Inference
Built on permissively licensed open IP — no encrypted vendor blobs, no single-supplier lock-in. Detection models are swappable: train and deploy your own without replacing the platform.
Vision subsystem · v1.0